|
F: Fortrend
W: Wafer
P: PLP substrate
M: Mask
C: Cassette
H: Humid
R: Robot
D: Arm Qty.
S: Single arm
D: Dual-arm
A*: X(X:Number of Arms)
|
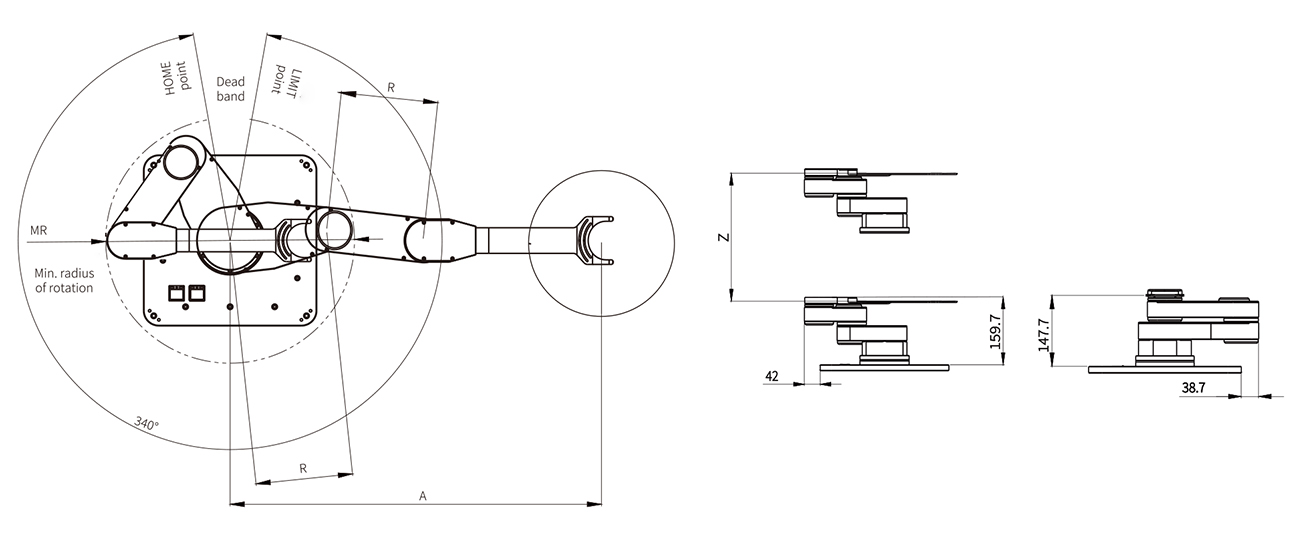
Axis-Z Height
240mm
300mm
400mm
500mm
Z*XXX (Customized)
LZ: Compact Lifting Height
240mm
300mm
400mm
500mm
LZ*XXX(Customized)
Dual-Z
ZD600mm
ZD700mm
ZD800mm
ZD*XXX (Customized)
Module-based
MZXXX
|
Drive Arm R Length
146mm
190.5mm
213mm
Eccentric ER (optional)
|
Special Module
Rta: Single arm FLiP
Rta2: Double Arm Up FLIP
Rta2: Double Arm Down FLIP
RtaD: Double arm double FLip
FR: wafer frame
No Options
|
End-effector Type
Ata: Vacuum suction
Cta: Edge gripper
Han: Clamp lift type
Ber1: Contact Bernoulli
Ber2: Non-Contact Bernoulli
Customer Customization
|
Fork Type
F: Original fork
No Options
|
Wafer Size
4″ / 6″ / 8″ / 12″
N*: Non-wafer object
|
Matching Options
M:
M1: Opposite-shooting Mapping Quantity 1
M2: Opposite-shooting Mapping Quantity 2
M*: Mapping Quantity 1
No Options
R:
R: Original teach pendant
No Options
TX:
T: Original Track axis
X: TRACK axis effective distance/mm
No Options
|
Special Customization
Have: Special Model
None: Normal Device
|
二工位产品中心白底图1420x750.jpg)
二工位产品中心白底图1420x750.jpg)

.jpg)






.jpg)




.jpg)
.jpg)










.jpg)
.jpg)
 (2).jpg)
 (1).jpg)
.jpg)
.jpg)





